

一.产品特性
1. FOC场定向矢量控制,降低运行噪音,支持速度闭环和速度开环控制。
2. 给定信号支持模拟量控制和PWM占空比控制。
3. 支持弱磁调速,能在小负载场合,超过额定转速50%运行。
4. 能直接外挂modbus数码显示,直接显示转速。
5. 带学习功能,可以学习电机相序和hall相序。
6. 供电电压+20V~50V。支持50~400W直流无刷电机(带hall信号)。
7. 内部隔离485(modbus协议RTU模式)(19200,8,N,1)控制方式。可以设定驱动器地址,简化控制系统。也可以直接通过PC机 控制,并提供PC机测试软件。
8. 具有欠压,过压,堵转,过热保护。
9. 提供隔离输出的 报警输出信号。
二.驱动器接口
|
POWER(电源接口) |
|
||
|
+V |
直流电源正极,+24V~+48V |
GND |
直流电源地。 |
|
Motor(电机动力线) |
|||
|
U |
电机 U 相线圈。 |
W |
电机 W 相线圈。 |
|
V |
电机 V 相线圈。 |
|
|
|
HALL(电机hall信号) |
|||
|
5V |
接电机上5V(驱动器输出5V) |
GND |
接电机上0V |
|
HALL_U |
接电机hall信号U |
HALL_V |
接电机hall信号V |
|
HALL_W |
接电机hall信号W |
|
|
|
Analog(模拟输入) |
|||
|
5V |
接电位器+ |
V-IN |
接电位器中点(或者电压输入0.5~45V对应0~设置的最高转速) |
|
GND |
接电位器- |
|
|
|
Digital Signal(输入数字信号) |
|||
|
5V_IN |
数字信号共阳端,接控制器5V |
PU- |
占空比信号输入端(10%~90%对应0~设置的最高转速) |
|
DIR- |
方向信号:高/低电平信号,DIR-高电平时4~5V,低电平时0~0.5V。 |
EN- |
使能信号:此输入信号用于使能或禁止。0V禁止。5V或者悬空使能。 |
|
BREAK- |
刹车信号,0V刹车,5V或者悬空正常运行。 |
|
|
|
Uart(通信及驱动器输出) |
|||
|
GND |
驱动器内部输出5V的GND |
485A |
485通信A端(D+端) |
|
485B |
485通信B端(D-端) |
+5V |
驱动器内部输出5V(最大100MA) |
|
V-IN |
电位器中点 |
COM |
输出信号公共端和485供电的GND |
|
WR |
报警输出,报警导通 |
OUT1 |
留用 |
|
Speed |
Hall信号输出 |
485_5v |
485供电的5V |
三.模式选择
功能选择:
|
SW1 |
SW2 |
模式 |
控制方式 |
|
OFF |
OFF |
闭环 |
PWM(10%~90%) |
|
OFF |
ON |
闭环 |
模拟电压(0.5~4.5V) |
|
ON |
OFF |
开环 |
PWM(10%~90%) |
|
ON |
ON |
开环 |
模拟电压(0.5~4.5V) |
四.状态指示与报警
开机后红灯绿灯都亮一次,用于检验LED是否工作正常。而后绿灯亮,红灯灭为正常状态。如果遇到报警状态,可以通过红色闪烁来判断原因,也可以通过modbus读取报警代码。
|
报警代码 |
红灯闪烁 |
报警原因 |
报警处理 |
|
0x11 |
一长闪一短闪 |
电机hall信号不正常 |
检查hall信号 |
|
0x12 |
一长闪二短闪 |
系统堵转报警 |
停机 |
|
0x13 |
一长闪三短闪 |
系统欠压报警 <15V |
停机 电压超过15V继续运行 |
|
0x14 |
一长闪四短闪 |
失速报警,负载过重 |
停机 |
|
0x15 |
一长闪五短闪 |
驱动器瞬时大电流 |
停机 |
五.驱动器接线图与控制方式
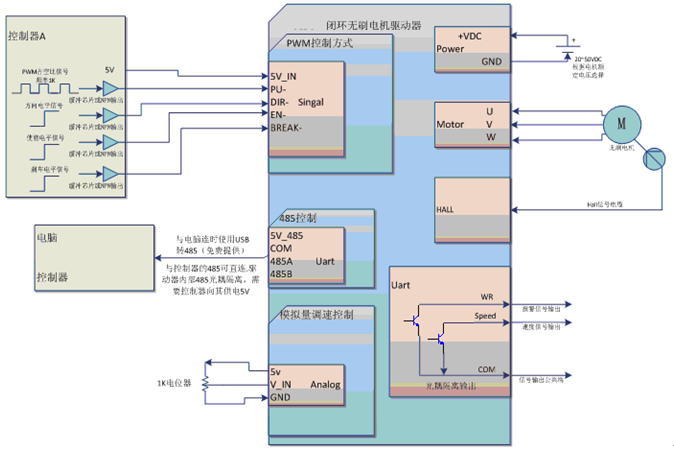
1. 驱动器典型接线图
如下图所示,驱动器工作需要接上20~50VDC的电源,电压根据电机的额定电压来选择,电机的UVW和hall信号已做好插头,直接插在驱动器上,如果需要加长线可做转接线加长。此版本提供光耦输出的 报警信号、速度信号,可以根据需要连接。
2. PWM占空比控制
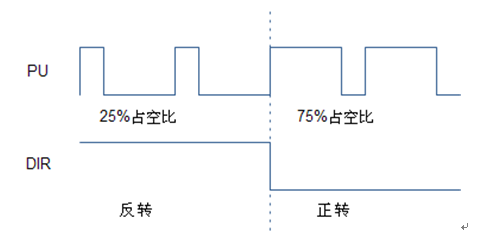
通过给PU的脉冲的占空比来控制转速,占空比转速范围10%~90%代表0~Max_Speed(闭环模式:Max_Speed为“闭环最大转速”,可 以通过上位机设置。开环模式:Max_Speed为100%占空比)。给PU的频率为1K~3K建议1K。
PU占空比 = (目标转速/3000)* 80% + 10%
例如:需要转速2000
PU占空比 = (2000/3000) * 0.8 + 0.1 = 63.3%
3. 模拟电压模式
通过给V-IN和GND之间电压信号以控制转速。0.5~4.5V信号对应0~Max_Speed(闭环模式:Max_Speed为“闭环最大转速”,可以 通过上位机设置。开环模式:Max_Speed为100%占空比)。
如果需要接电位器控制转速,请按典型接线图接电位器。
六常见问题处理
1. 如果脉冲控制端口DIR导通方向和我所需要的方向不同怎么改?
答:可以通过上位机来设置DIR的极性,接上上位机后,modbus使能写1 , DIR极性 写 0. 最后参数保存标志写1. 重新上电即可。
2. 比较小的负载,如何超过额定转速运行
答:本款驱动器带弱磁调速功能,可以通过改变弱磁角度,超过额定转速运行。通过连接上位机软件设置。连上驱动器和电脑,能正常通行后。 Modbus使能 发送 1 。 弱磁角度 发送 100 (0~300代表0~30°,角度越大可以达到的最高转速越高,但是可以输出的扭矩越小,根据自己的需要测试) 。 参数保存标志 发送 1. 重新上电。再测试。

 客服1
客服1  客服2
客服2