

一.产品特性
1. 采用32位高速DSP芯片。
2. FOC场定向矢量控制,支持位置/速度闭环。
3. 位置模式支持指令脉冲+方向 或 正交脉冲信号。
4. 速度模式支持PWM占空比信号 或 4~20ma电流 或 0.6~3V电压信号控制。
5. 16位电子齿轮功能,1~65535 / 1~65535 。
6. 供电电压+20V~50V。支持50~500W交流伺服电机。
7. 支持串口(modbus协议RTU模式)控制方式。串口(TTL电平)控制方式,可以设定驱动器地址,简化控制系统。也可以直接通过PC机控制,并提供PC机测试软件。
8. 具有欠压,过压,堵转,过热保护。
二.驱动器控制方式简介
1. 脉冲控制模式接线图

2. 指令脉冲+方向位置控制模式

指令脉冲数 = 电机运行的步数 * 电子齿轮
指令脉冲频率 = (电机运行的转速/60) * 电子齿轮 * 编码器线速
例如:电机需要运行1.5圈,编码器线数为1000, 电子齿轮设置为2/1, 需要转速为1500R/MIN。
指令脉冲数 = 1.5*1000 /( 2/1) = 750;
指令脉冲频率 = (1500 / 60 ) * 1000 / (2/1) = 12.5K
注:改变DIR方向,应提前脉冲5US以上。
3. 正交指令脉冲位置控制模式
这种模式可以用于编码器跟随,如一个轴接了编码器,将编码器输出接到驱动器,驱动器就能控制电机,按输入编码器的信号,随动于控制的编码器。
正转脉冲:
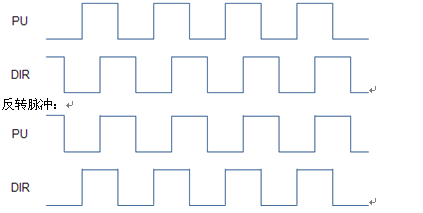
指令脉冲数 = PU 脉冲的个数
电机转动的方向:PU上升沿超前DIR上升沿 为正转。PU上升沿滞后DIR上升沿 为反转。
4. PWM占空比速度控制模式
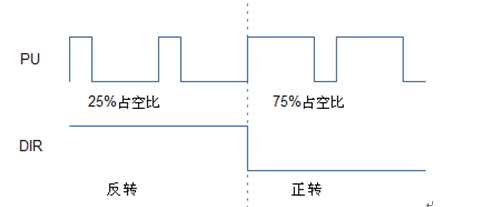
通过给PU的脉冲的咱空比来控制转速,占空比转速范围10%~90%代表0~3000R/MIN。给PU的频率为1K±10%。
PU占空比 = (目标转速/3000)* 80% + 10%
例如:需要转速2000
PU占空比 = (2000/3000) * 0.8 + 0.1 = 63.3%
5. 电压或电流信号速度控制模式
通过给V-IN和GND之间电压或电流信号以控制转速。4mA~20mA(或0.6~3V)信号对应0~3000RPM.
如果需要电位器控制转速,按下图接线。
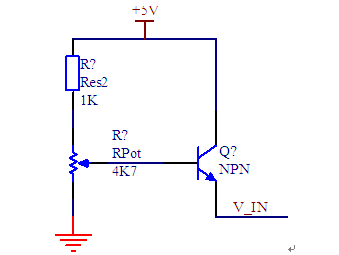
5V , GND , V_IN都接在驱动器的UART端子上。
三. 驱动器接口
1. 控制信号接口
|
名称 |
功能 |
|
PU+(+5V) |
脉冲控制信号:脉冲上升沿有效;PU-高电平时4~5V,低电平时 0~0.5V。 为了可靠响应脉冲信号,脉冲宽度应大于 1.2μs。如采用+12V 或+24V 时需串电阻。 |
|
PU-(PU) |
|
|
DIR+(+5V) |
方向信号:高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号 至少 5μs 建立。DIR-高电平时4~5V,低电平时0~0.5V。 |
|
DIR-(DIR) |
|
|
EN+(+5V) |
使能信号:此输入信号用于使能或禁止。ENA+ 接+5V,ENA-接低电平(或内部光耦导通)时,驱动器将切断电机各相的电流使电机处于自由状态,此时 脉冲不被响应。当不需用此功能时,使能信号端悬空即可。 |
|
EN-(EN) |
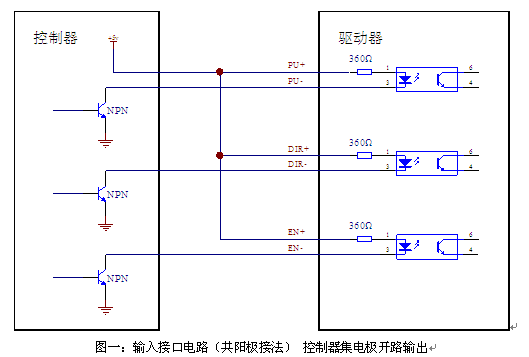
采用差分式接口电路可适用差分信号,单端共阴及共阳等接口,内置高速光电耦合器,允许接收长线驱动器,集电极开路和 PNP 输出电路的信号。在环境恶劣的场合,我们推荐用长线驱动器电路,抗干扰能力强。现在以集电极开路和 PNP 输出为例,接口电路示意图如下:

2. 强电接口
|
名称 |
功能 |
|
+V |
直流电源正极,+24V~+48V,电压过高或过低都会引起驱动器报警停机。 |
|
GND |
直流电源地。 |
|
U |
电机 U 相线圈。 |
|
V |
电机 V 相线圈。 |
|
W |
电机 W 相线圈。 |
3. 电机信号接口
|
端子号 |
符号 |
功能 |
|
1 |
A+ |
编码器A相正 |
|
2 |
B+ |
编码器B相正 |
|
3 |
GND |
+5v电源地 |
|
4 |
HALL_W |
磁极信号W相 |
|
5 |
HALL_U |
磁极信号U相 |
|
6 |
PG |
外壳 |
|
7 |
Z+ |
编码器Z相正 |
|
8 |
Z- |
编码器Z相负 |
|
9 |
HALL_V |
磁极信号V相 |
|
10 |
NC |
无连接 |
|
11 |
A- |
编码器A相负 |
|
12 |
B- |
编码器B相负 |
|
13 |
+5V |
+5v电源,给传感器供电 |
|
14 |
NC |
无连接 |
|
15 |
NC |
无连接 |
4. 串口通信接口
可以通过专用串口电缆连接 PC 机。通过提供的上位机软件可以设置驱动器参数,和测试驱动器,并提供一些诊断信息,来排除驱动器故障。
|
端子号 |
符号 |
功能 |
|
1 |
GND |
信号地 |
|
2 |
RX |
驱动器串口发送端(TTL电平) |
|
3 |
TX |
驱动器串口接收端(TTL电平) |
|
4 |
+5V |
外供5V 最大100mA(可定制为NPN输出报警信号) |
|
5 |
V_in |
调速电压信号输入 |
5. DIP开关
功能选择:
|
SW1 |
SW2 |
模式 |
控制方式 |
|
OFF |
OFF |
位置模式 |
脉冲+方向 |
|
OFF |
ON |
位置模式 |
编码器跟随 |
|
ON |
OFF |
速度模式 |
PWM占空比 |
|
ON |
ON |
速度模式 |
4~20MA 或 0.6~3V |
6. 状态指示与报警
开机后红灯绿灯都亮一次,用于检验LED是否工作正常。而后绿灯亮,红灯灭为正常状态。如果遇到报警状态,可以通过红色闪烁来判断原因,也可以通过modbus读取报警代码。
|
报警代码 |
红灯闪烁 |
报警原因 |
报警处理 |
|
0x10 |
一长闪 |
系统高温报警 >60℃ |
继续运行 |
|
0x20 |
二长闪 |
写flash失败 |
继续运行 |
|
0x11 |
一长闪一短闪 |
系统过热报警 >90℃ |
停机 温度降至70℃以下继续运行 |
|
0x12 |
一长闪二短闪 |
系统堵转报警 |
停机 重新开机 或MODBUS写入EN使能后继续运行 |
|
0x13 |
一长闪三短闪 |
系统欠压报警 <20V |
停机 电压超过20V继续运行 |
|
0x14 |
一长闪四短闪 |
失速报警,负载过重 |
停机 重新上电 |
四.参数调试
根据电机所接负载不同,参数需要调整才能达到最佳效果。
大惯性负载调试过程如下
1. 电机接上负载后,给一个高速定位脉冲(或通过上位机设定),到达指定位置后,如果出现过冲(既电机到指定位置后会往回转一小段距离)或低速的来回抖动,说明电机参数刚性不足。加大 速度环kp 减小 速度环KI。
2. 再按步骤1运行,如果仍然存在过冲或来回抖动,继续加大 速度环kp 减小 速度环KI 。如果上两个参数都已经到最值。则说明负载惯性太大,电机无法按指定加减速曲线运行,此时减小 位置环KP,此参数减小后,会使得减速曲线平缓,不至于过冲或来回抖动。
小惯性负载调试过程如下
1. 电机接上负载后,给一个高速定位脉冲(或通过上位机设定),到达指定位置后,如果出现电机轴快速振荡(在一个很小的位置范围内快速振荡),说明电机参数刚性过大。减小 速度环kp 加大 速度环KI。
2. 再按步骤1运行,如果仍然存在快速振荡,继续减小 速度环kp 加大 速度环KI 。位置环KP 值越大,减速越快,能更快的完成定位,但是值过大就会引起振荡,所以在振荡值*0.7~0.8作为位置环KP较为合适。
五. 常见问题处理
1. 如果脉冲控制端口DIR导通方向和我所需要的方向不同怎么改?
答:可以通过上位机来设置DIR的极性,接上上位机后,modbus使能写1 , DIR极性 写 0. 最后参数保存标志写1. 重新上电即可。
2. 如果给电机定位停止后会往回走一小段怎么解决?
答:说明电机刚性不够,可以通过上位机修改参数来解决。提高速度环KP的值,减小速度环KI的值,如果依然不够,就减小位置环KP的值。
3. 如果电机停止后电机会高频振动怎么解决?
答:说明电机刚性太高,可以通过上位机修改参数来解决。减小速度环KP的值,加大速度环KI的值。

 客服1
客服1  客服2
客服2